
 Spain
Spain
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
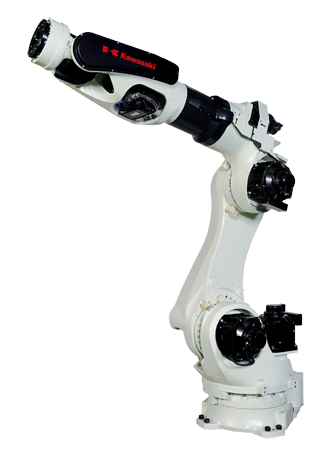
川崎BX165N
BX165Nは、スリムなアームを備えた省スペース設計のロボットで、パフォーマンスを阻害することなく「高密度」アプリケーションに簡単に取り付けることができます。スポット溶接に理想的な高速を提示することにより、大きな作業スペースと大きな柔軟性を提供し、ケーブルやホースを配線する中空の手首を提供し、大きな溶接ガンをサポートできることが特徴で、その自動較正機能はガン速度最小化サイクルの加速と減速を改善する回。
Eコントローラ
Eコントローラは、コンパクトで信頼性が高く、高性能であり、CPUに高度な技術を持ち、生産性と軌道制御を可能にします。シーケンス制御を提供するプログラミング言語を使用するKawasaki ASテクノロジによってサポートされる幅広い産業アプリケーション。最大10軸の拡張が可能で、16軸の完全制御が可能です。モジュラーコンポーネントと限られたケーブルによりメンテナンスと診断が容易です。
- 各地域の一次エネルギー分配電圧に最適
- 拡張能力の拡大
- 間接冷却システムによる閉鎖構造
- デジタルサーボシステム
- I / Oチャネル32(max128)
主な仕様
ロボットの最大荷重:165 kg
軸数:6
最大水平距離:2,325 mm
最大垂直距離:3,209 mm
繰り返し精度:±0.2 mm
コントローラー:E32
軸数:6
最大水平距離:2,325 mm
最大垂直距離:3,209 mm
繰り返し精度:±0.2 mm
コントローラー:E32
動作範囲(°)
軸JT1:±160°
軸JT2:+ 76°/ -60°
軸JT3:+ 90°/ -75°
軸JT4:±210°
軸JT5:±125°
軸JT6:±210°
軸JT2:+ 76°/ -60°
軸JT3:+ 90°/ -75°
軸JT4:±210°
軸JT5:±125°
軸JT6:±210°
最高速度(°/ s)
軸JT1:105°/ s
軸JT2:130°/ s
軸JT3:130°/ s
軸JT4:120°/ s
軸JT5:160°/ s
軸JT6:300°/ s
軸JT2:130°/ s
軸JT3:130°/ s
軸JT4:120°/ s
軸JT5:160°/ s
軸JT6:300°/ s
ロボットアプリケーション
キャリースポット溶接
ペデスタルスポット溶接
マテリアルハンドリング
摩擦スポット接合
マシンの管理
マテリアルハンドリング
材料除去
スポット溶接
ペデスタルスポット溶接
マテリアルハンドリング
摩擦スポット接合
マシンの管理
マテリアルハンドリング
材料除去
スポット溶接

{kind=link}