
 Spain
Spain
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
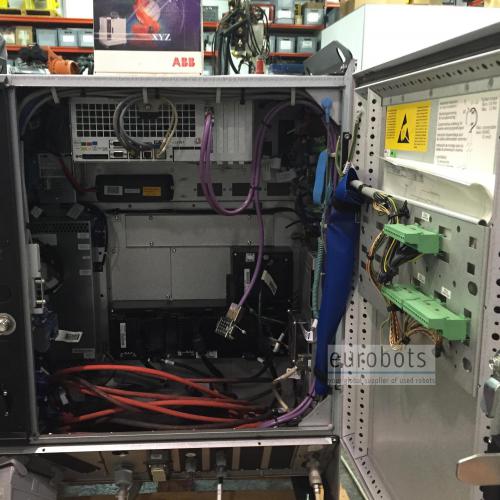
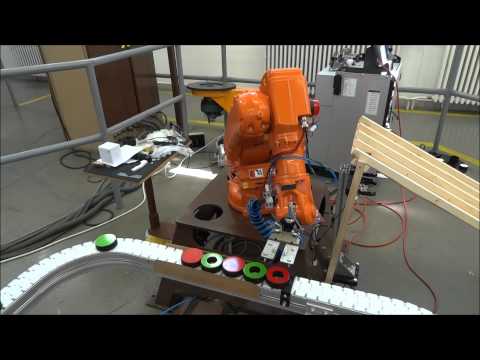
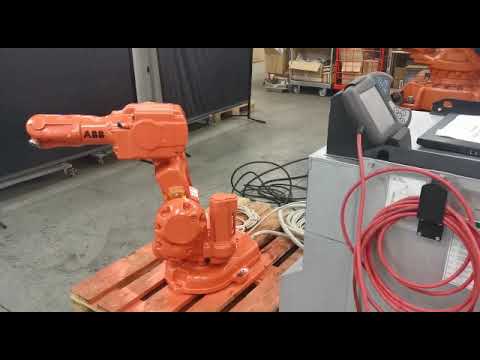
ABB IRB 140 M2004
この小型でユニークなロボットは、高速加速、広い作業領域、および高いペイロードを独自に組み合わせた、コンパクトで強力な6軸マシンです。部品の組み立てや軽量部品の積み降ろしなど、短いサイクルタイムと正確さが要求される作業に最適です。
信頼性 - 高い生産稼働時間
速い - 短いサイクルタイム
同クラス最速のロボット。 IRB 140Tを使用すると、最高のアクセス速度と高速性と独自のABBモーションコントロールを組み合わせることでサイクルタイムが大幅に短縮されます。 QuickMove
正確 - 一貫した部品品質
優れた位置再現性(±0.03mm)と非常に優れた軌跡精度
強い - 最大限の利用
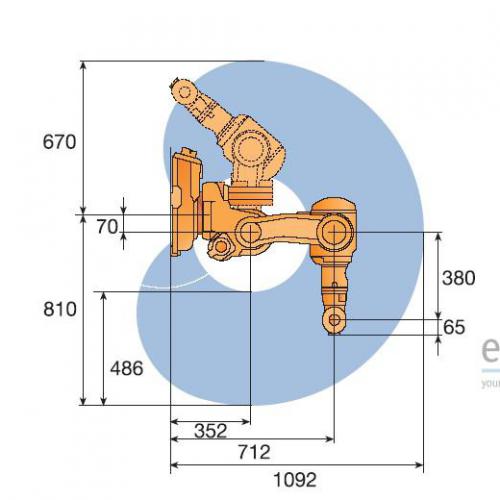
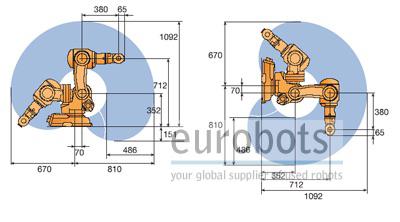
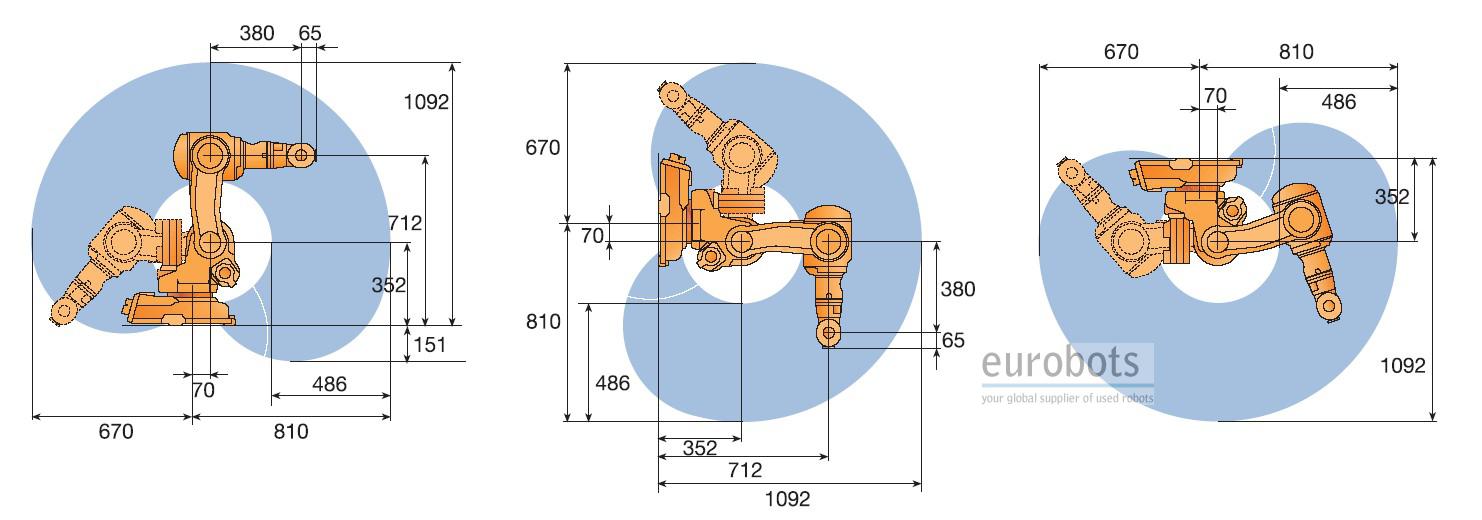
最大5kgの可搬重量と810mmのリーチの組み合わせにより、このロボットはそのクラスで最高のものとなっています。
多目的 - 柔軟な統合と生産
標準IRB140は、任意の角度で床または壁に取り付けることができ、あるいは吊り下げることができ、それによって製造ラインのレイアウトをより柔軟に配置することができる。上部アームの折り返し機構、360度の軸1回転、および柔軟な取り付け機能により、作業領域の半径が大幅に広がります。
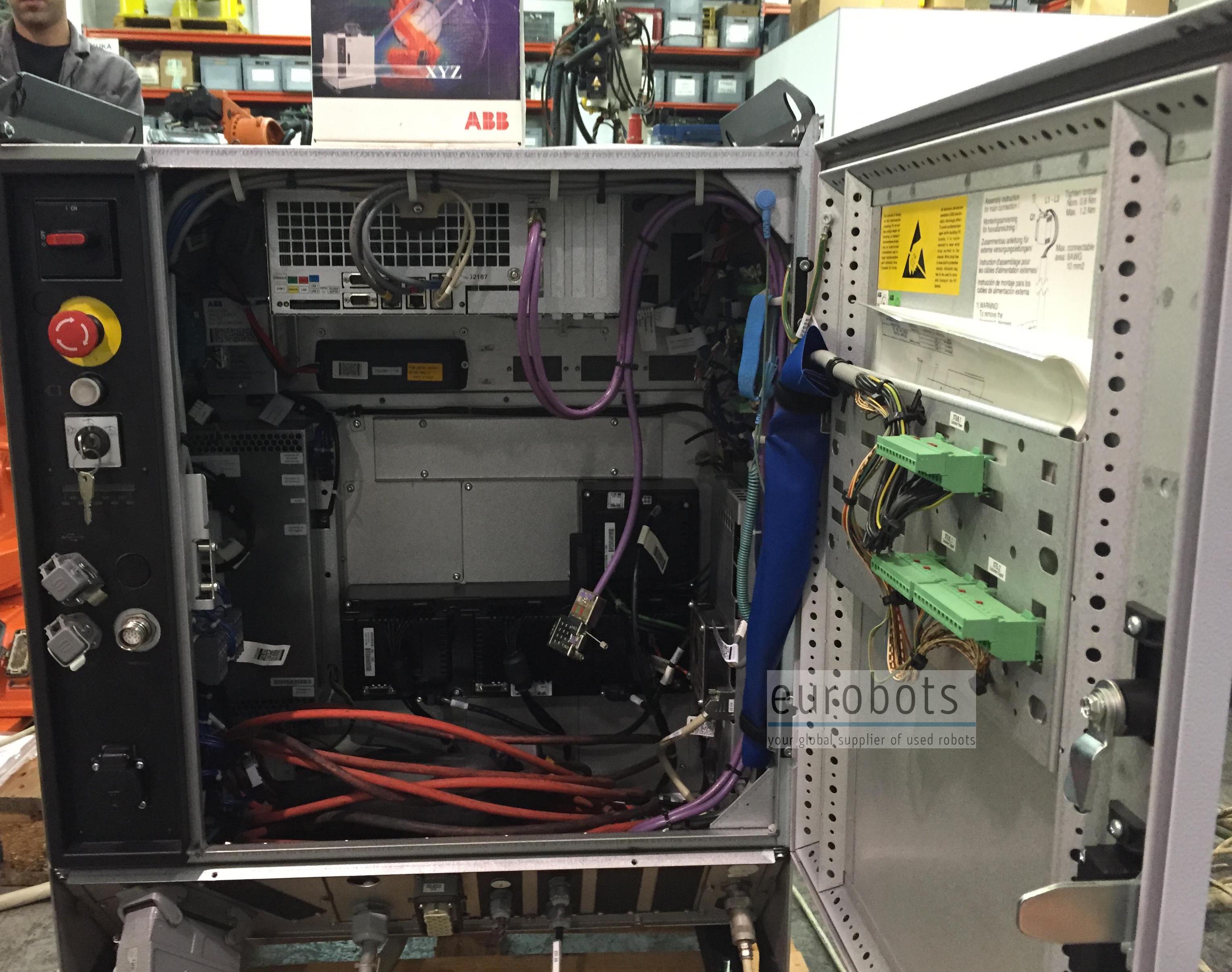
このロボットには、IRC5 M2004(第5世代ABB制御システム)コントローラが付属しています。
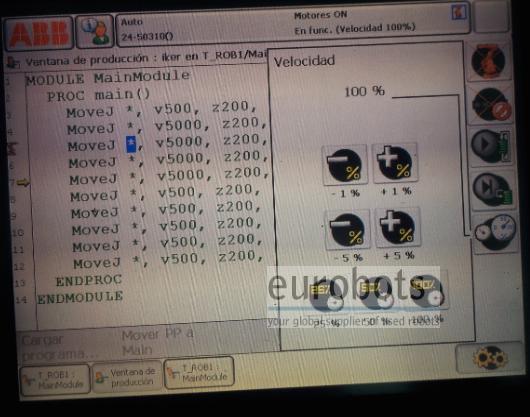
フレックスペンダント
FlexPendantは、その清潔でカラーのタッチスクリーンベースのデザインと直感的なインタラクションのための3Dジョイスティックを特徴としています。カスタマイズされた強力なアプリケーションサポートにより、
RAPIDプログラミング言語
RAPIDプログラミングは、シンプルさ、柔軟性、そして力を完璧に組み合わせたものです。それは構造化プログラム、製造現場言語をサポートする本当に無制限の言語です
そして高度な機能。それはまた多くのプロセスアプリケーションに対する強力なサポートを組み込んでいます。
コミュニケーション
IRC5は、I / O用の最先端のフィールドバスをサポートしており、あらゆるプラントネットワークで正常に機能するノードです。センサーインターフェース、リモートディスクアクセス、ソケットメッセージングは、多くの強力なネットワーク機能の例です。
運動制御
IRC5は、I / O用の最先端のフィールドバスをサポートしており、あらゆるプラントネットワークで正常に機能するノードです。センサーインターフェース、リモートディスクアクセス、ソケットメッセージングは、多くの強力なネットワーク機能の例です。
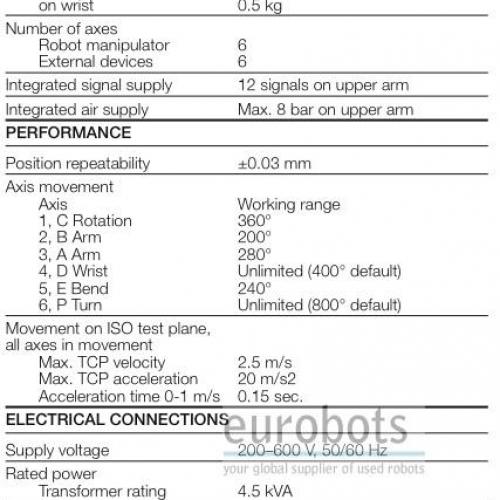
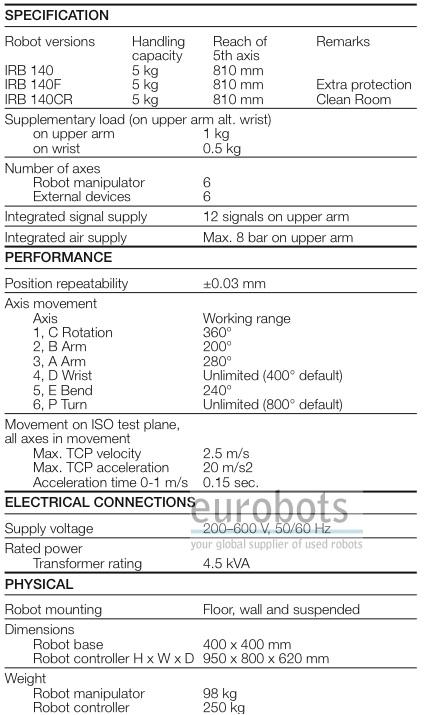
一般仕様
- ロボットの最大荷重:5kg
- 軸数:6
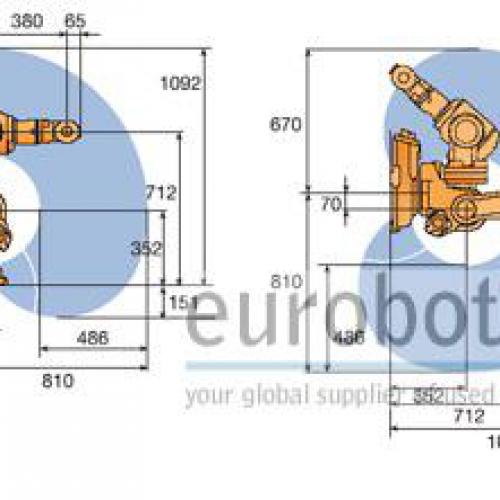
- 最大リーチ:810 mm
- 繰り返し精度:0.03 mm
- コントローラ:IRC5 M2004
ロボット動作速度
- 軸1:200º/ s
- 軸2:200º/ s
- 軸3:260º/ s
- 軸4:360º/ s
- 軸5:360º/ s
- 軸6:450º/ s
ロボット動作範囲
- 軸1:±360°
- 軸2±200°
- 軸3±280°
- 軸4±400°
- 軸5±240°
- 軸6±800°
アプリケーション
部品のロードとアンロード , 部品の取り扱い , 測定



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}