Staubli articulated robot TX60L compact design with degree of protection IP65 (suitable for harsh environments) of great dexterity and flexibility., Wide envelope of spherical work that provides maximum utilization of the workspace of the cell. it has a maximum payload of 5 kg and an arm reach of 920 mm. Another advantage of this robotic arm is that its wiring and pipes are routed through the arm to eliminate obstacles in the work area, can be mounted on floor, wall or ceiling, offers high performance trajectory and optimal quality of pieces. Excellent option to reduce costs.
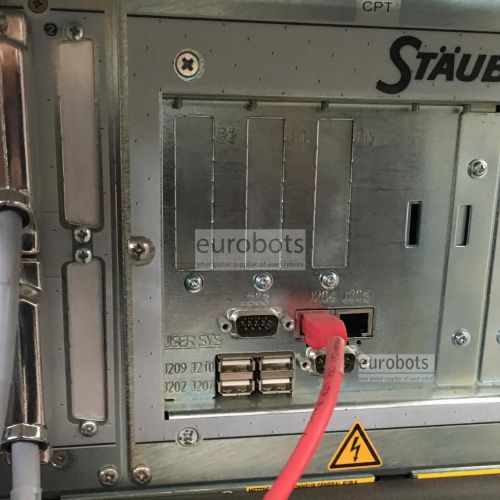
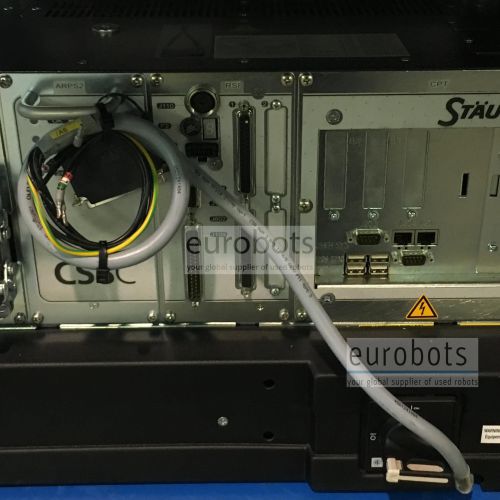
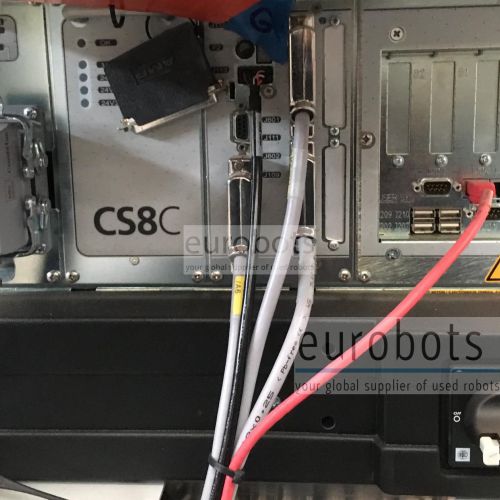
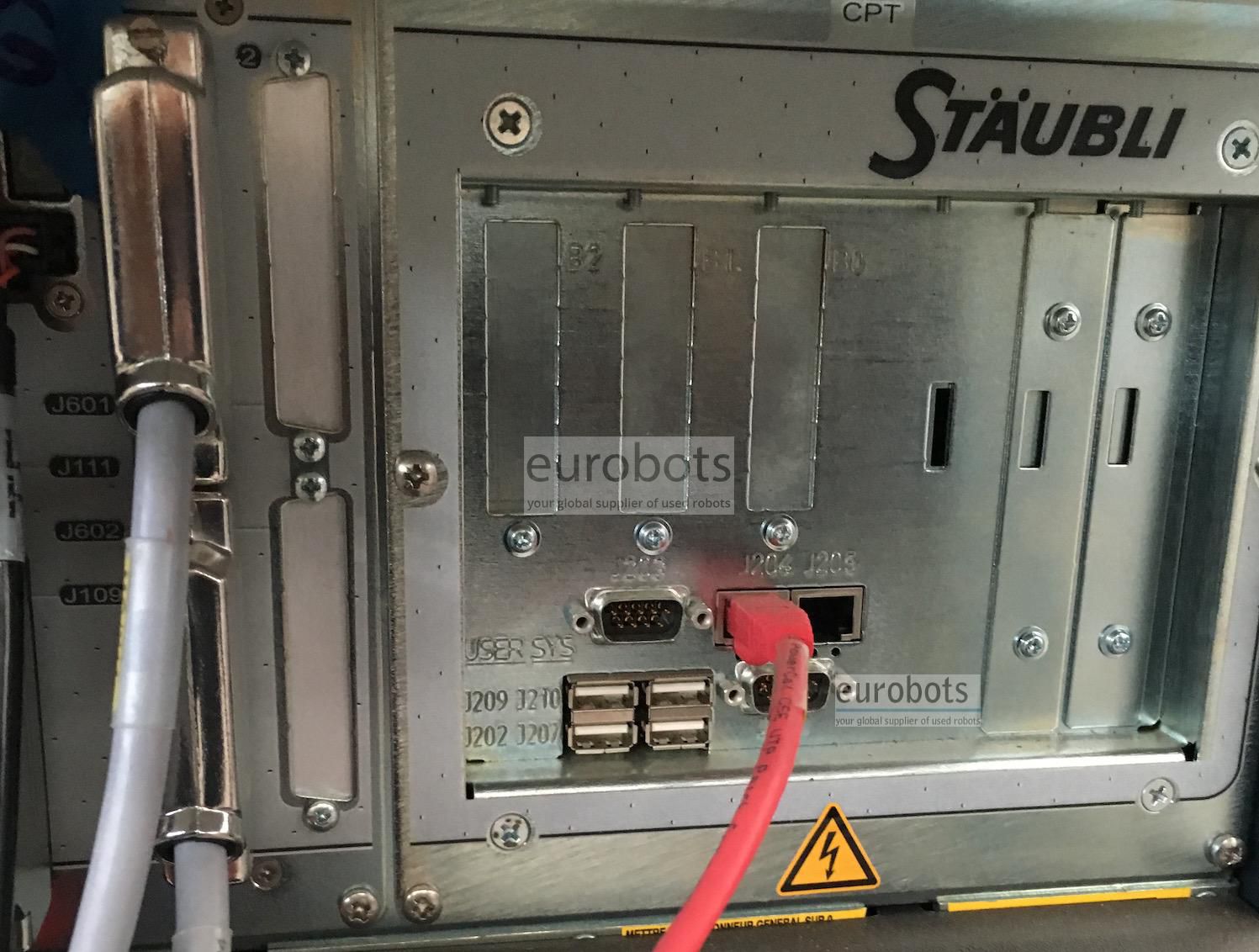
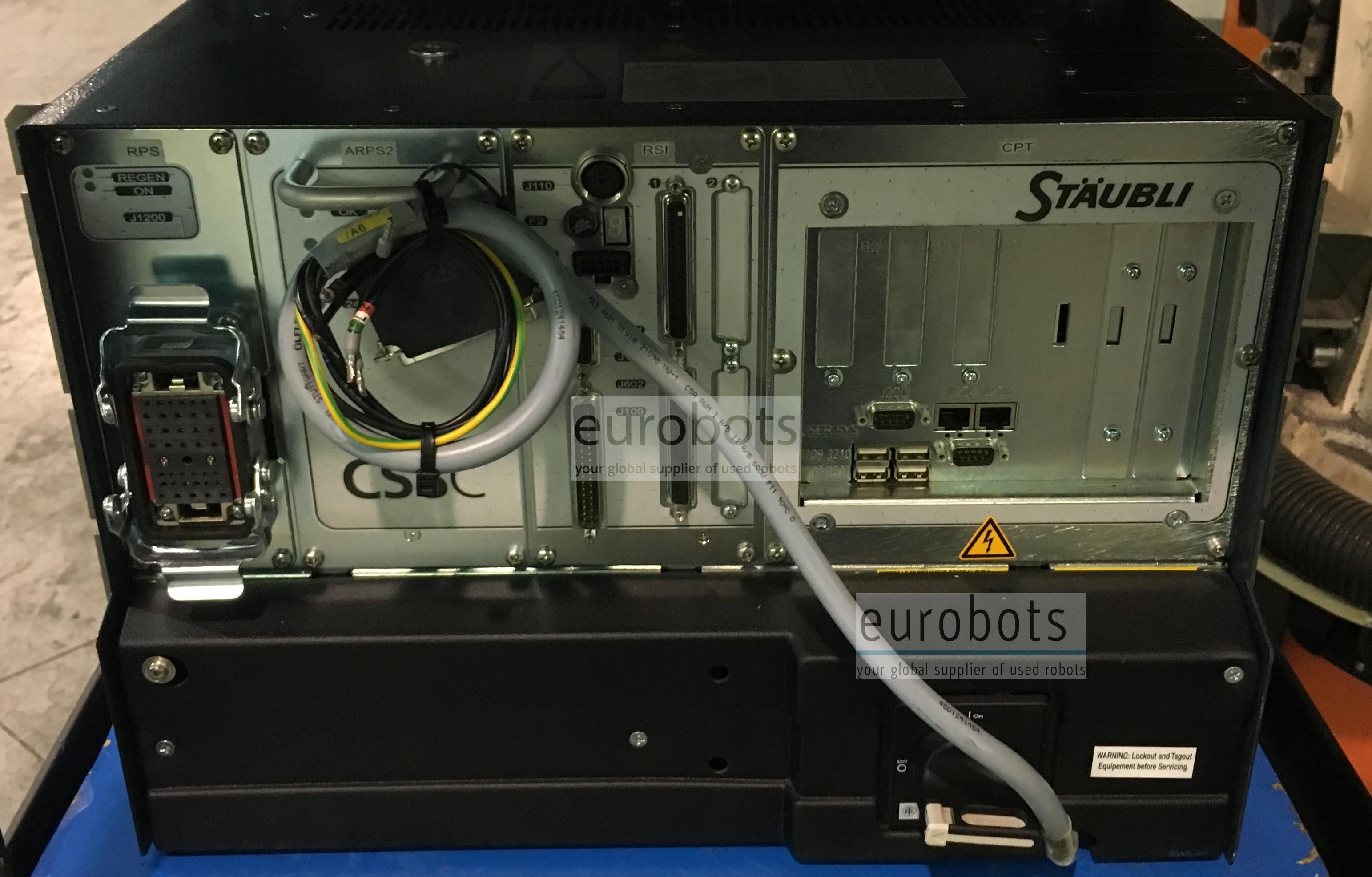
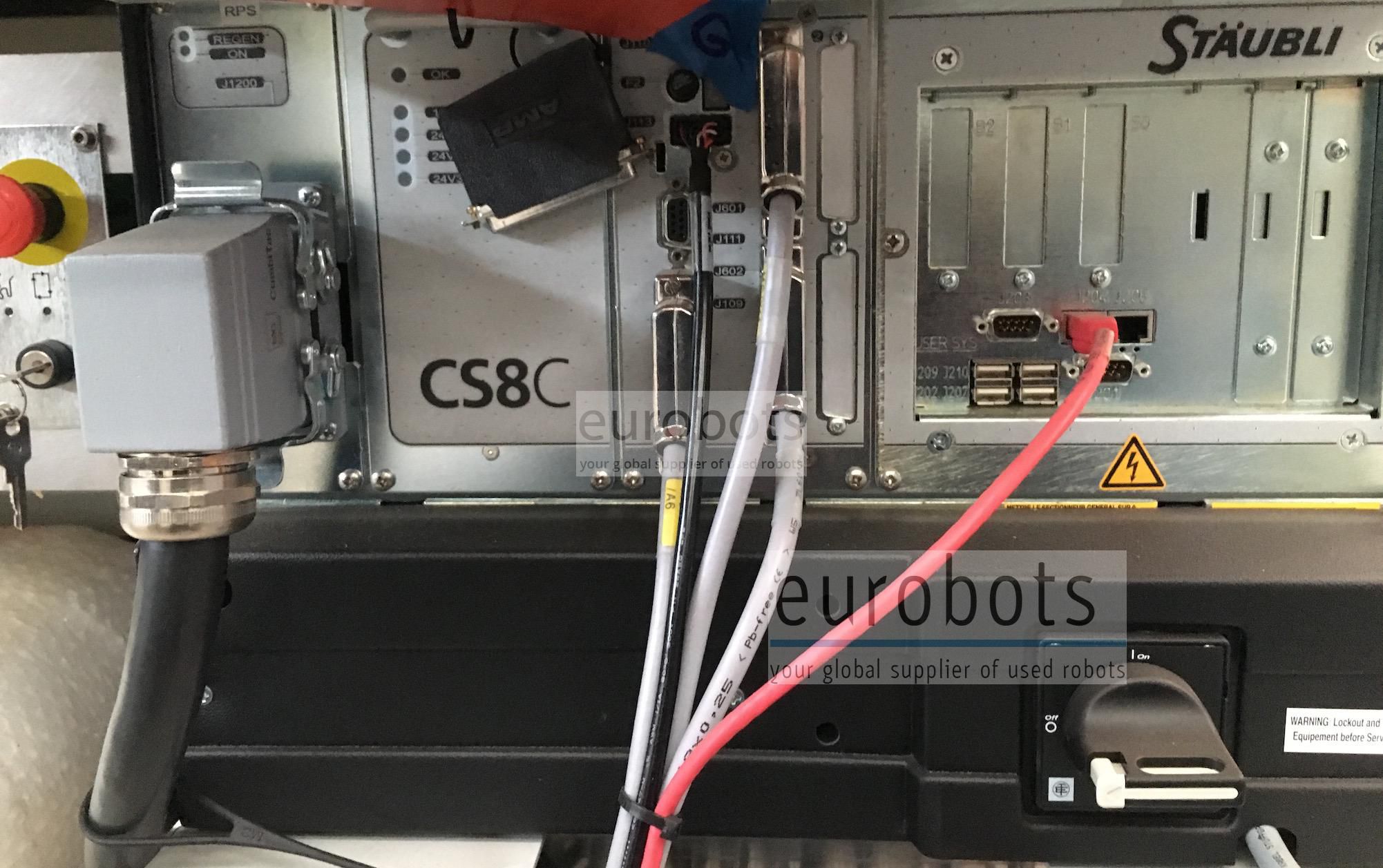
Powerful and versatile compact CS8C controller
controller CS8C specifications
- Ethernet, field bus, digital inputs/outputs, serial connections
- Open architecture
- Easy to install anywhere
- IP20
- 19-inch rack version
- Compactness
- All connections on front panel
- Accessibility
- 100 % digital technology
- Reliability
- Dimensions: H x L x D: 331 x 445 x 455 mm
- Protection class: IP20 (IP54 option)
- Memory capacity:64 MB de RAM ( min.)
- Memory storage: 64 MB (min.) Flash Disk
- System/ Programming language
- VAL 3 (multitask interpreted language)
- PLC-IEC 61131-3 language
- Communication:RS232/422 serial link - Ethernet Modbus server
- Inputs/ Outputs (I/O): 1 or 2 boards 16/16 digital inputs/ outputs, optional
- Field bus: DeviceNet, Profibus, CANopen, ModBus
Main specifications
- Number of axis: 6
- Maximum Load of Robot: 5 Kg
- Maximum reach: 920 mm
- Repeatability: ± 0.03 mm
- Controller: CS8C
Range of motion
- Axis 1: ± 180°
- Axis 2: ± 127,5°
- Axis 3: ± 152,5°
- Axis 4: ± 270°
- Axis 5: +132.5°/-122.5°
- Axis 6: ± 270°
Motion Speed
- Axis 1: 435°/s
- Axis 2: 385°/s
- Axis 3: 500°/s
- Axis 4: 995°/s
- Axis 5: 1065°/s
- Axis 6: 1445°/s
Robot Applications
- Assembly
- Cleaning/Spraying
- Machine tending
- Material handling
- Packing
- Deburring
Applications
Loading and unloading of parts , Handling of parts , Measurement , Assembly of parts


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}