
 Spain
Spain
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
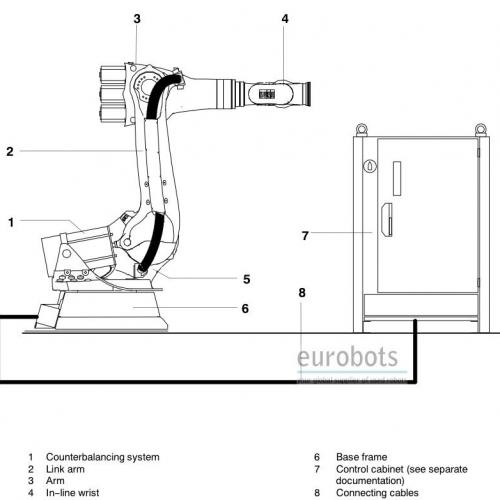
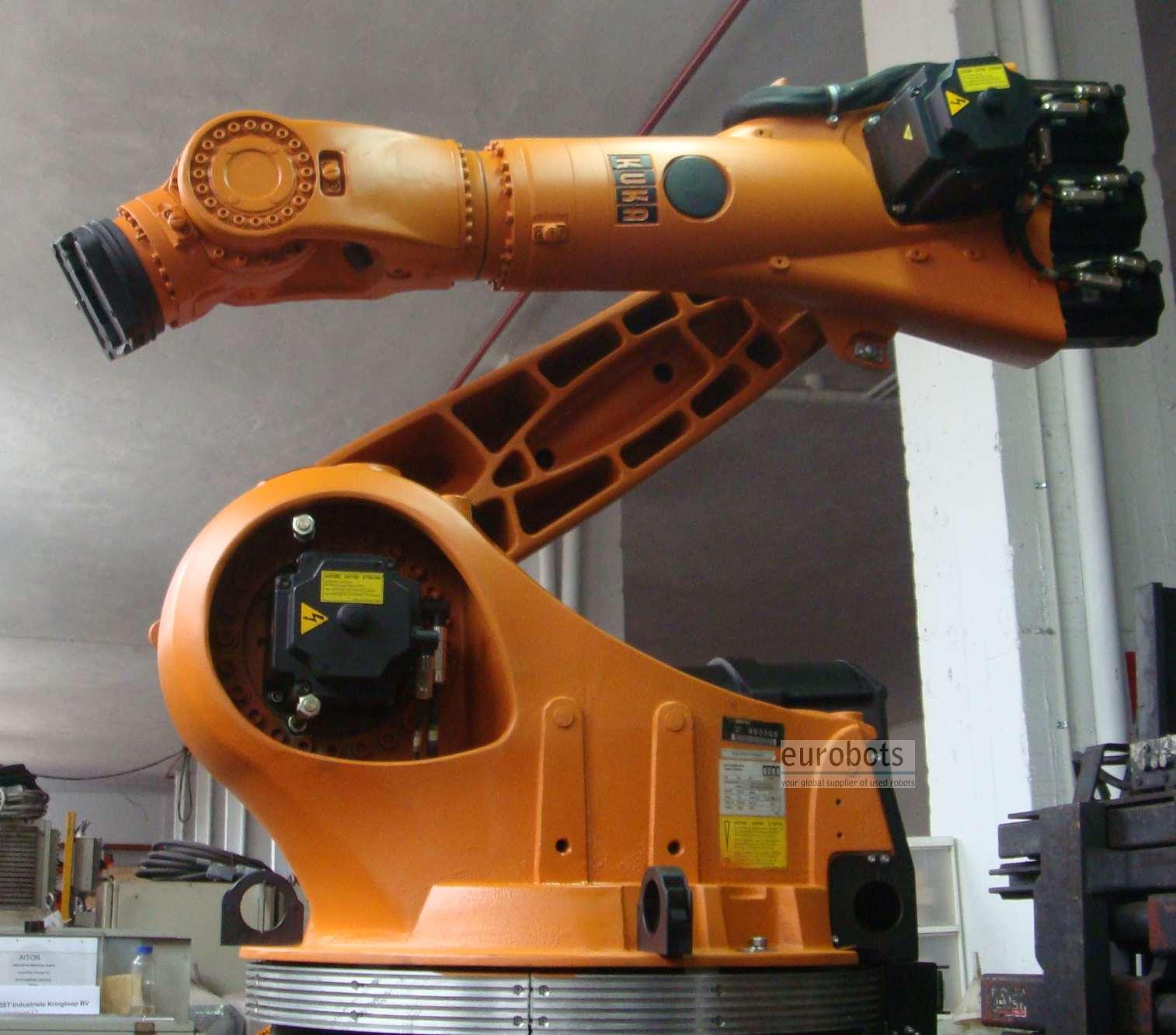
KUKA KR210 VKRC2 control
Robot industriale KUKA KR210 ha 6 assi con controllo VKRC2. Robot con un alto carico di peso per applicazioni generali. Questo robot è essenzialmente uguale al KR210 serie 2000 controllo KRC2 controllo standard. La differenza è nel software che usa un sw della KUKA 3.3.4 disegnato dalla casa automobilistica Volkswagen. L’ hardware della armadio di controllo è quasi identico, la filosofia e il sistema di programmazione è uguale.
Differenze di programmazione tra il KRC2 e il VKRC2:
La maggior differenza è data dal sistema che è aperto dall’inizio, si possono controllare le opzioni per la programmazioni aperte ad ogni programma in due livelli:
Username:
Livello predefinito di programmazione che ci permette di calcolare gli attrezzi per lavorare e basi caricate e anche per la calibrazione esterna del robot, lo sviluppo di programmi ,modifiche ,duplicati, cancellazione ecc. Inoltre in questo livello si possono modificare delle variabili definite nel programma e vedere output permettendo inputs.
Expert:
Questo livello è definito avanzato ,tutte le opzioni sono aperte al programma, in questo caso, la creazione di programmi è esclusa, alternativamente possiamo rivedere i programmi progettati per introdurre il codice del programma. E’ ha questo livello che i drivers sono anche configurati per comunicare con la periferica.
Tutti i programmi creati con questo sistema hanno nomi costruiti con lo sviluppo considerato appropriato per ciascun ruolo da compiere "Grab_part", "lift_fixer" etc ...
Il management tradizionale dei programmi può essere fatto attraverso il programma “Cell” connesso al PLC e tutti I programmi possono essere connessi tra di loro.
Sistema di Controllo “VKRC2”
Questo sistema di controllo è usato dal gruppo Automobilistico Volkswagen.La caratteristica principale è la facilità della programmazione e la rapida diagnosi del sistema.Nel sistema VKRC2 i modelli sono sempre user and expert ma tutto può essere fatto dal nome dell’user. L’accesso expert-level si ottiene con una chiave.La programmazione è fatta in minor tempo perché la principale caratteristica dell ‘introduzione del codice, che è fatto con differenti opzioni che sono apparse nelle chiavi, dipendendo dalle opzioni che abbiamo; in breve non un cattivo ingresso nel codice dei programmi. Ovviamente, il sistema non ti dice se le istruzioni che abbiamo aggiunto sono corrette.Esempio: (OUT "56" TRUE), quando forse sarebbe necessario dire (OUT "56" FALSE)
Folge:I programmi possono essere usati con questo sistema e avere una struttura definita.Questi programmi sono controllati attraverso un’automazione esterna e puo’ solo essere chiamata da un automa.
UP: Sub con movimento puo’ solo essere chiamato da uno o un altro UP Folge
Makro:Sub nessun movimento che puo’ essere chiamato da un Folge,un UP o un altro Makro.
Con questo sistema,noi perdiamo la capacita’ di calcolare le basi. Questo puo’ essere risolto diversamente con 3 punti definiti nel database e trattarli come se loro fossere un attrezzo esterno.Dopo aver calcolato l’attrezzo, noi calcoliamo da un punto a qualunque altro punto della base e le cordinate Cartesiane risulatanti sara’ il punto particolare.
In conclusione:
Il sistema di controllo VKRC2 è piu’ veloce da programmare ma perde efficenza per applicazioni che richiedono programmazione specifica. Questo sistema è creato per lavorare con uno standard definito che è tutto organizzato.Il sistema di controllo KRC2 da molto gioco alla programazione,tutte le possibilita’ sono aperte e questo è importante per attrezzature che sono molto diverse tra di loro.Comunque, la programmazione in expert mode è esattamente la stessa con tutti e due i sistemi di controllo e tutti e due sono identiche per le caratteristiche di performance nella manipolazione e il risulatato finale è uguale.
E’ sempre lo stesso robot industriale ma puo’ essere programmato in 2 maniere:
VKRC2 piu’ veloce
KRC2 piu’ versatile
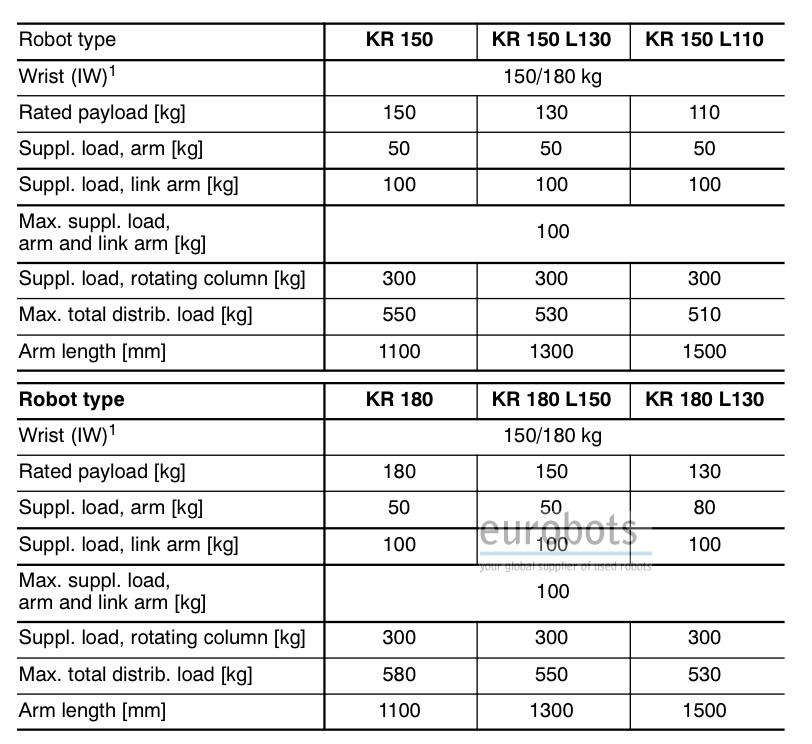
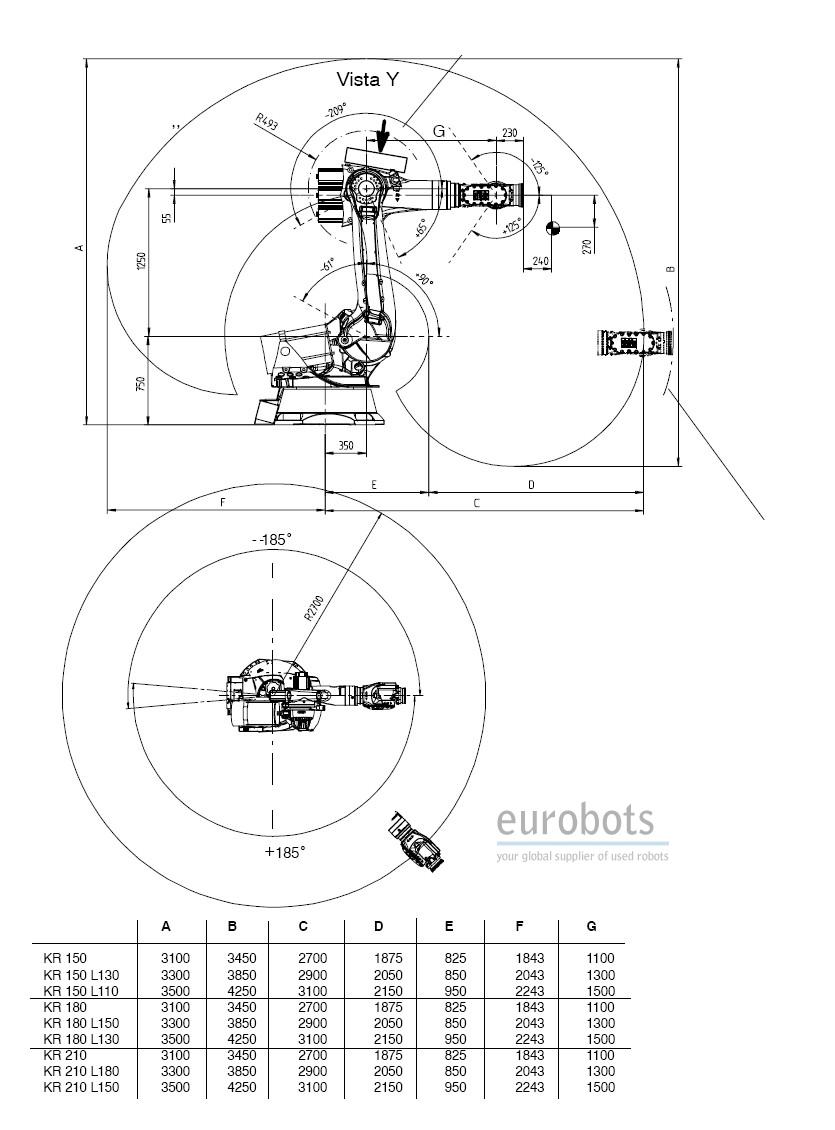
Informazioni del Robot:
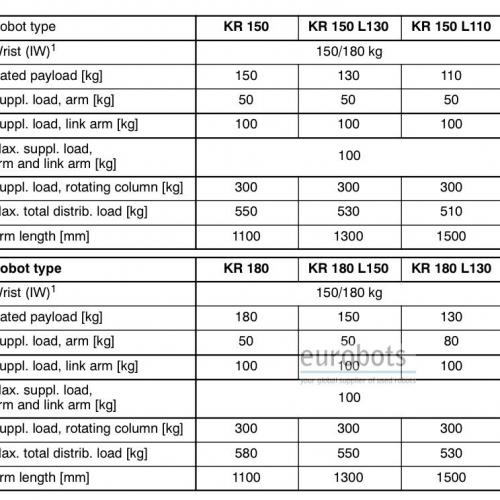
- Carico massimo del Robot: 150/180/210Kg.
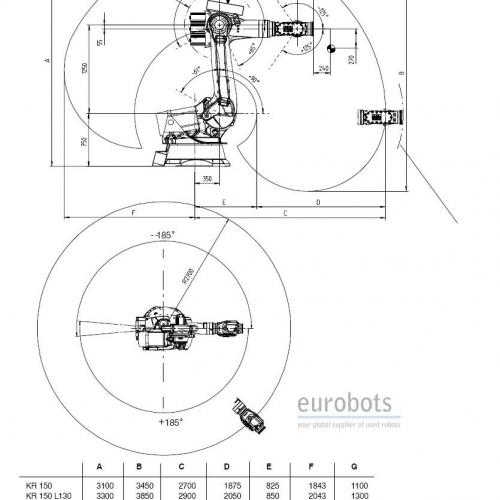
- Massima Estenzione: 2700/2900/3100 mm.
- Ripetibilità: 0.15/0,2 mm.
- Controllo: VKR C2 software 3.3.4
Velocità di movimento del Robot:
- Asse 1: 105º/sec
- Asse 2: 110º/sec
- Asse 3: 95º/sec
- Asse 4: 170º/sec
- Asse 5: 170º/sec
- Asse 6: 238º/sec
Applicazioni del Robot:
- Lavorazione a macchina
- Machine tending
- Levigatrice, smerigliatrice e messa a punto.
- Rivestimento e Legame
- Manipolazione
- Misurazione e testaggio
- Assemblaggio
- Paletizazione e altre tipi di prese
- Taglio
- Saladatura
Applicazioni
Saldatura ad arco , Saldatura a punti , Asservimento presse , Pallettizzazione , Carico e scarico dei pezzi , Lavorazione meccanica , Manipolazione di pezzi , Saldatura Laser Nd-Yag , Incollaggio - Incollaggio adesivo , Saldatura stud






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}