
 Spain
Spain
 Germany
Germany
 France
France
 Russia
Russia
 China
China
 Argentina
Argentina
 Portugal
Portugal
 Colombia
Colombia
 Italy
Italy
 India
India
 Brazil
Brazil
 Japan
Japan
 Mexico
Mexico
 Turkey
Turkey
 Ukraine
Ukraine
 Peru
Peru
 Sth. Africa
Sth. Africa
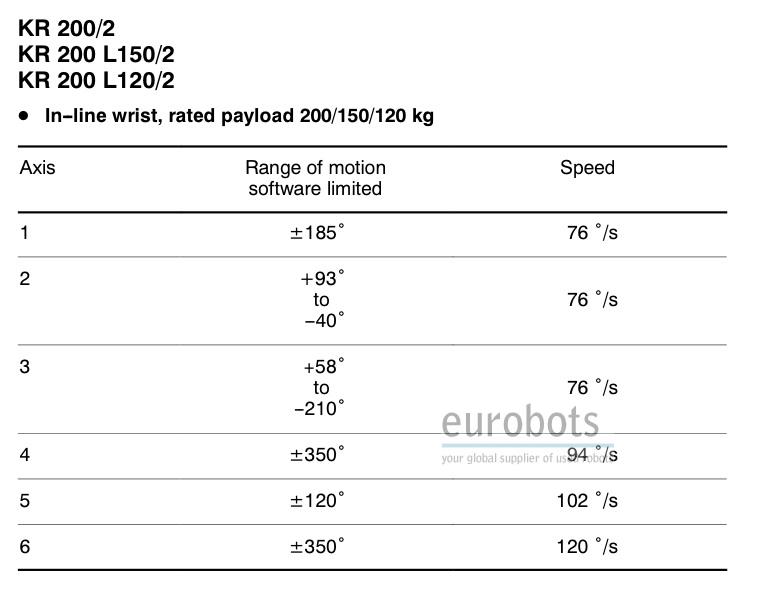
KUKA KR125 KR150 KR200
Il KUKA KR125/150/200 con controllo KR C2 e´identico meccanicamente al KR 150/2. Robot industriale di 6 assi e con una carica di 125/150/200 kg puo´essere montato nel suolo o nel soffitto.La differenza e´il controllo: KR C2 posteriore al KR C1. Possibilita´d' integrazione `della opzione CONVEYOR TRACKING per la manipolazione dei pezzi in linea d´automazione produttiva.
La unita´del controllo del robot KR C2 facilita la programmazione grazie a Windows. Contiene dei software pre-elaborati,le caratteristiche del KR C2 marcano il futuro della automatizzazione.
Caratteristiche del controllo KR C2:
- Tecnologia PC aperta e compatibile con la rete.
- 2 spine libere per l´uso di un asse addizionale.
- Come equipaggioamento standar include spine Device Net e Ethernet per il sistema bus abituale(Es. INTERBUS, PROFIBUS, DeviceNet)
- Funzione movimento di profilo per ottenere una ottima interazione tra i diversi motori e le sue rispettive velocita´.
- Unita di dischetti e CD.ROM per il backup dei dati.
- Diagnosi via Internet
- Facilita´di operazione e programmazione grazie al pannello di controllo (KCP) con Windows con interfaccia del user name.
- Cabina di controllo compatta
- Pannello di controllo KUKA-Control Panel(KCP) con un disegno anatonico.
Informazioni del Robot:
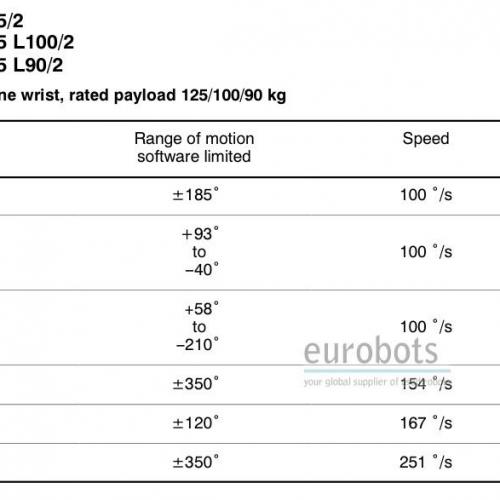
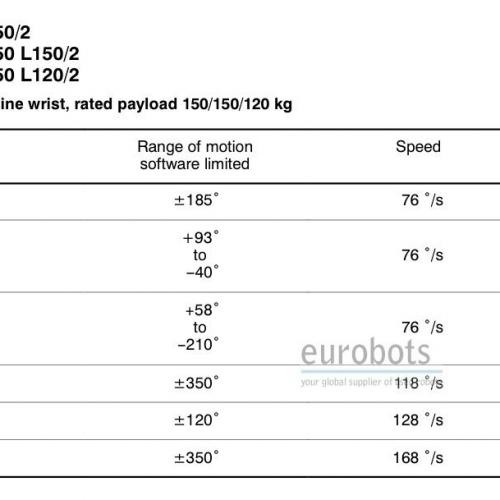
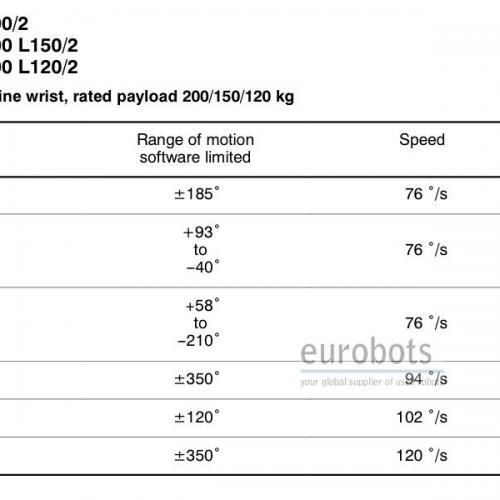
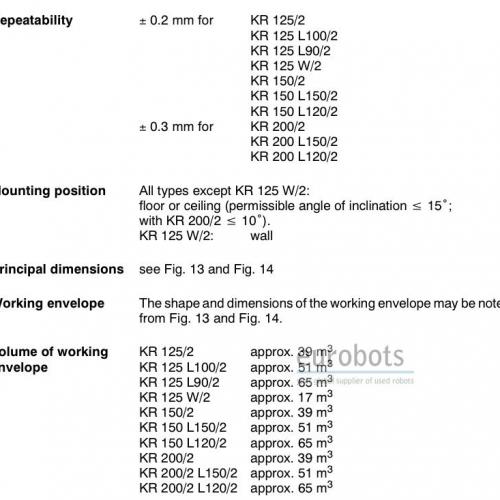
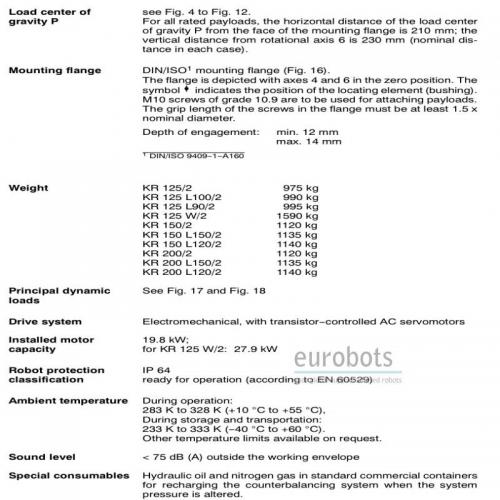
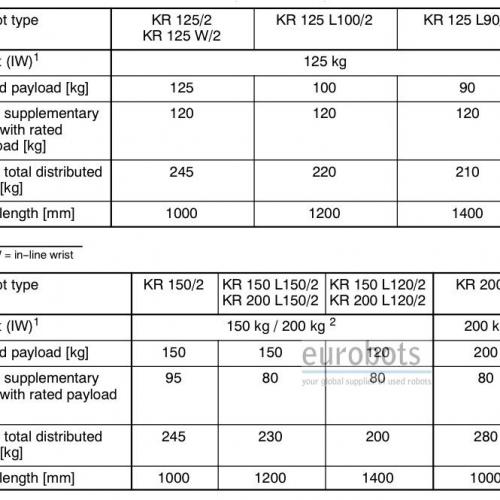
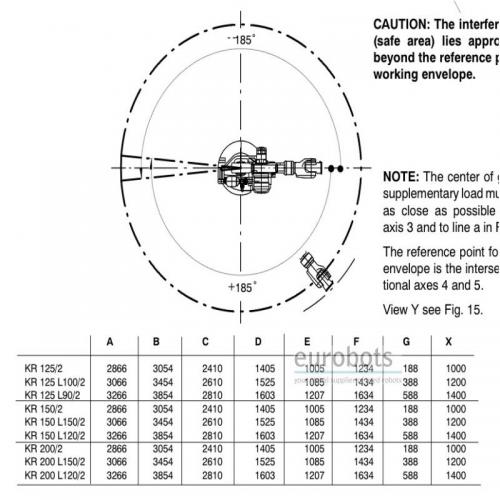
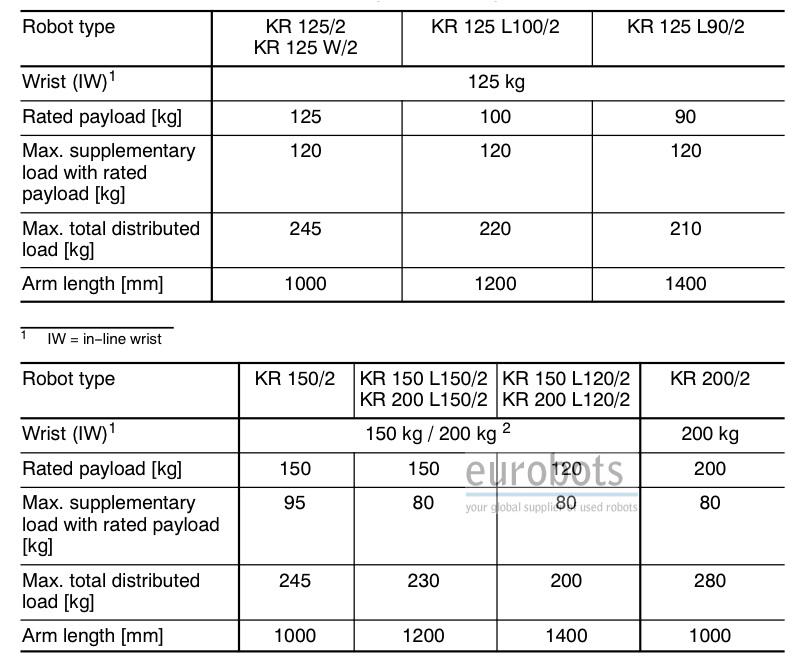
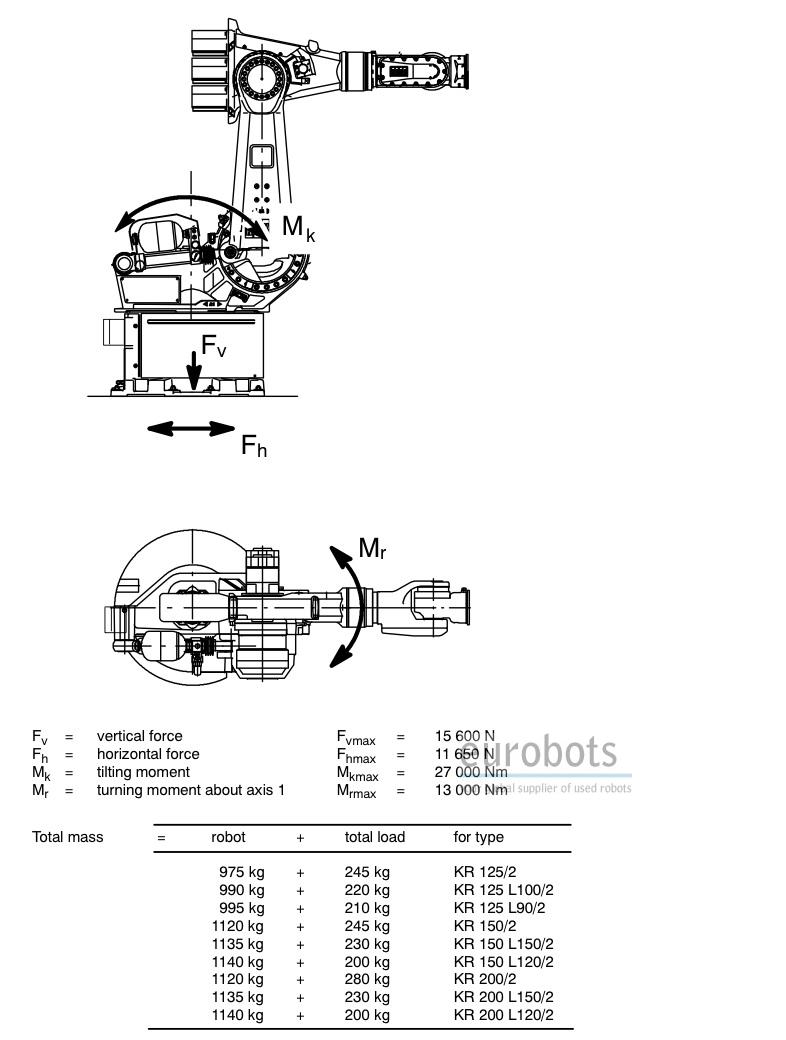
- Carico massimo del Robot: 125/150/200Kg.
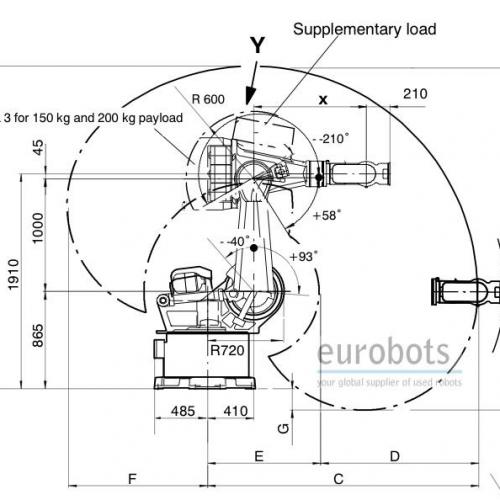
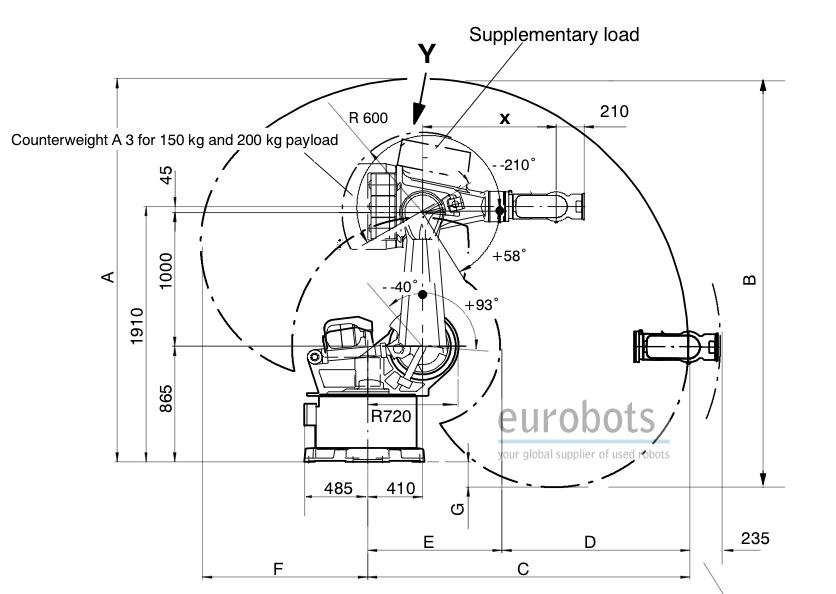
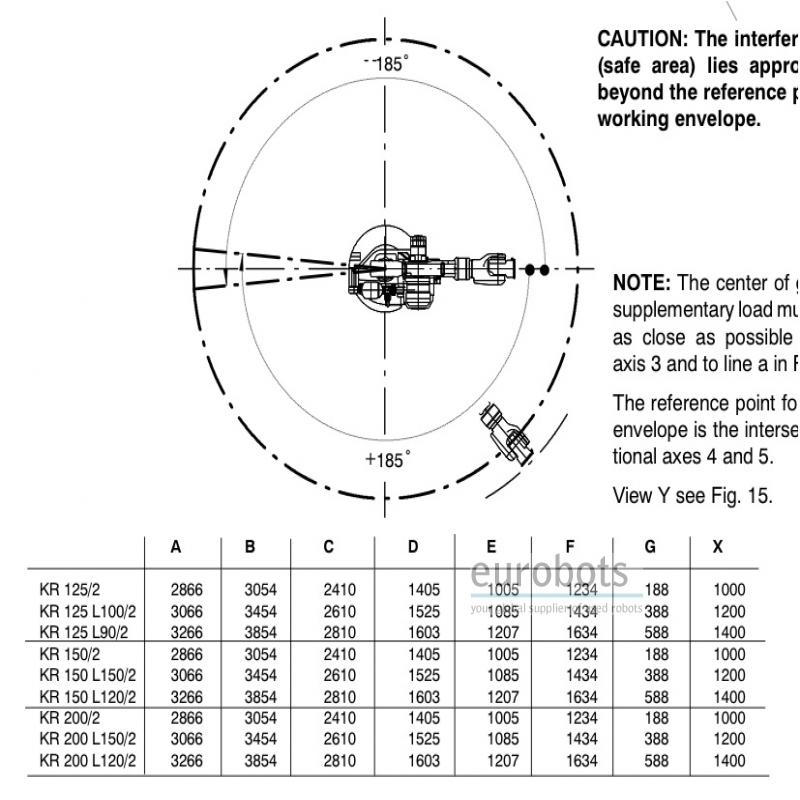
- Massima Estenzione: 2400/2600/2800 mm.
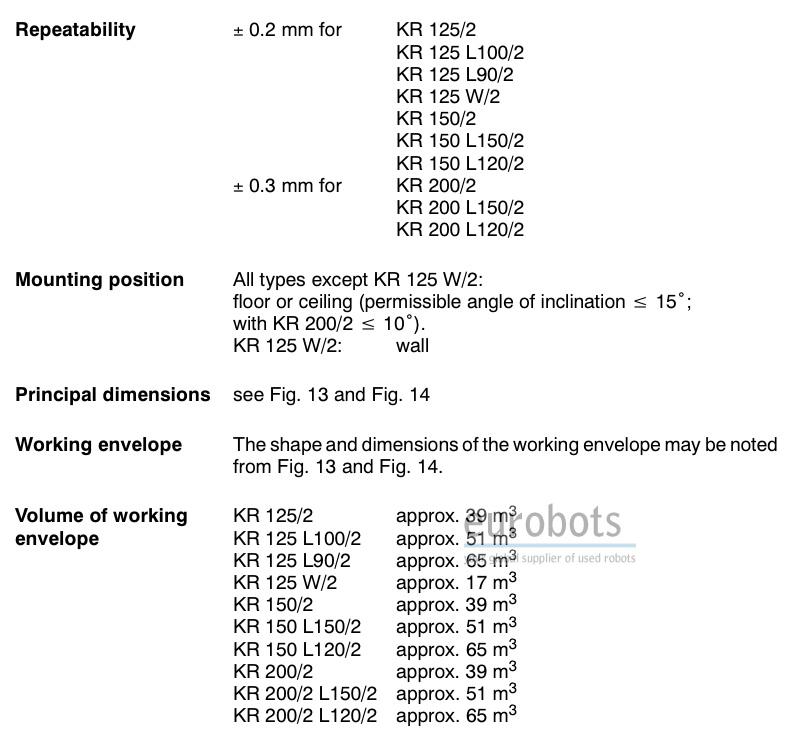
- Ripetibilità: 0,2/0,2/0,3 mm.
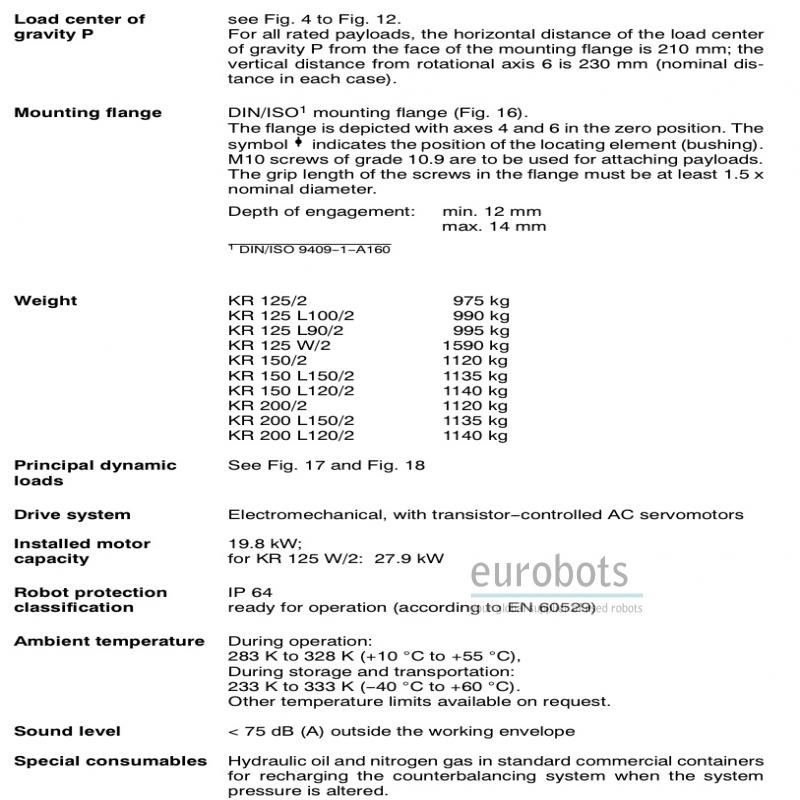
- Controllo: KR C2.
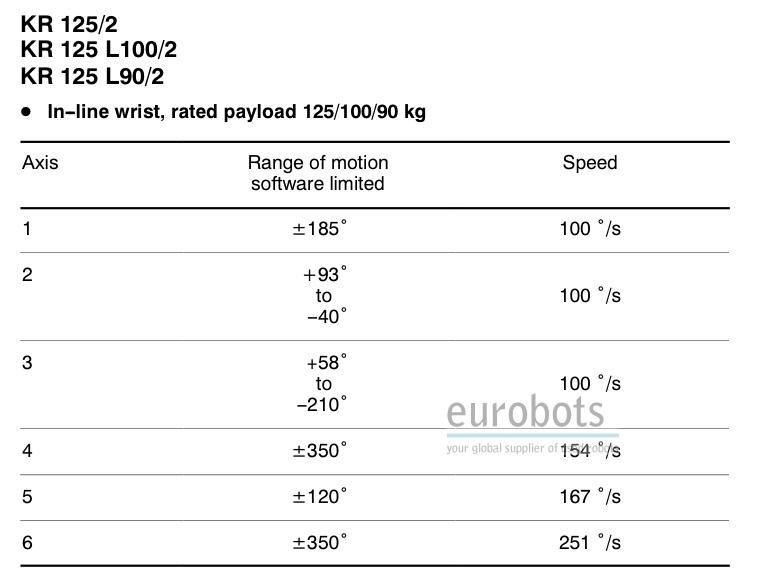
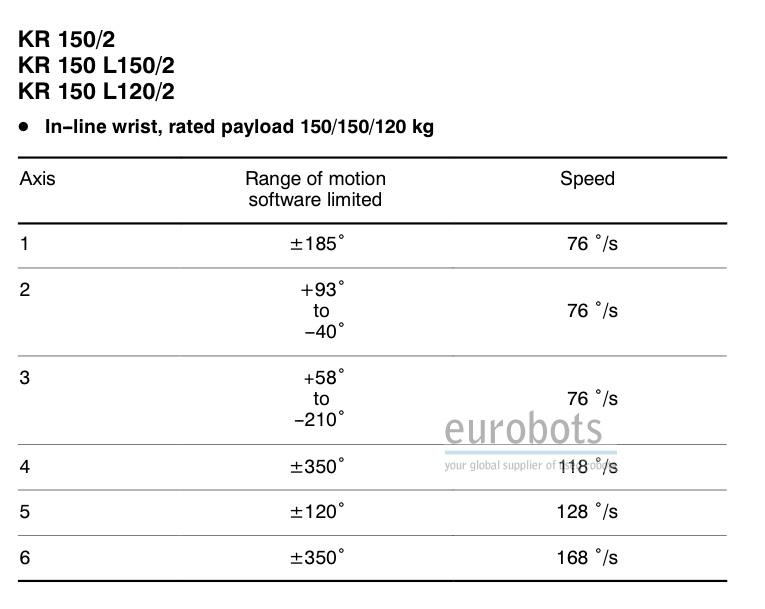
Velocità di movimento del Robot:
- Asse 1: 120º/sec
- Asse 2: 230º/sec
- Asse 3: 245º/sec
- Asse 4: 716º/sec
- Asse 5: 182º/sec
- Asse 6: 218º/sec
Applicazioni del Robot:
- Lavorazione a macchina
- Machine tending
- Levigatrice, smerigliatrice e messa a punto.
- Rivestimento e Legame
- Manipolazione
- Misurazione e testaggio
- Assemblaggio
- Pallettizzazione e altre tipi di prese
- Taglio
- Saldatura
Applicazioni
Saldatura ad arco , Saldatura a punti , Asservimento presse , Pallettizzazione , Verniciatura , Carico e scarico dei pezzi , Lavorazione meccanica , Manipolazione di pezzi















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}